Kopf Sprungziel

KAMIR2 Kanalroboter
in hydraulischer Roboter für Fräsarbeiten in Abwasserkanälen wird an einer langen Leitung mit Hydraulik-Versorgung und Steuerkabel betrieben.
Aus Platzgründen müssen die hydraulischen Proportionalfunktionen mit getakteten Schaltventilen realisiert werden. Eine adaptive, selbstlernende Software berücksichtigt die aktuellen Öleigenschaften, Druck- und Lastverhältnisse. Im Ergebnis können auch ganz langsame, feinfühlige Bewegungen ausgeführt werden.
Die Stromversorgung für die Ventile wird am Steuergerät so geregelt, dass bei einem Spannungsabfall vom 0-50V auf der Zuleitung die Ventile mit 24V angesteuert werden.
Die Bedienung erfolgt wahlweise von einem Tischpult unter Videoüberwachung oder mobil mit einem Handsteuerpult. Die Steuerung mit Ventiltreibern, Analogdatenerfassung, Stromversorgung und 68000-Prozessrechner ist in einem 6HE 19"-Einschub untergebracht.
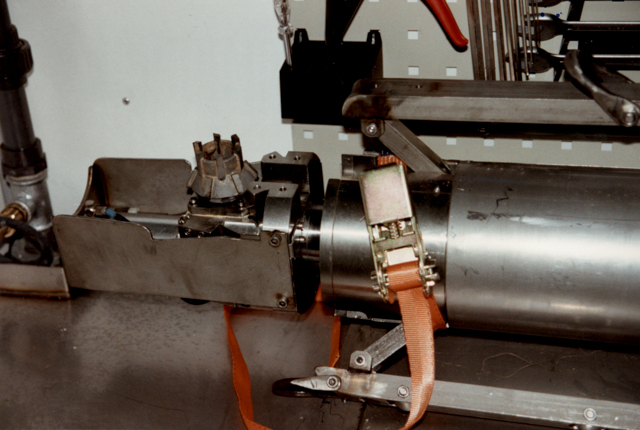
Der Fäskopf
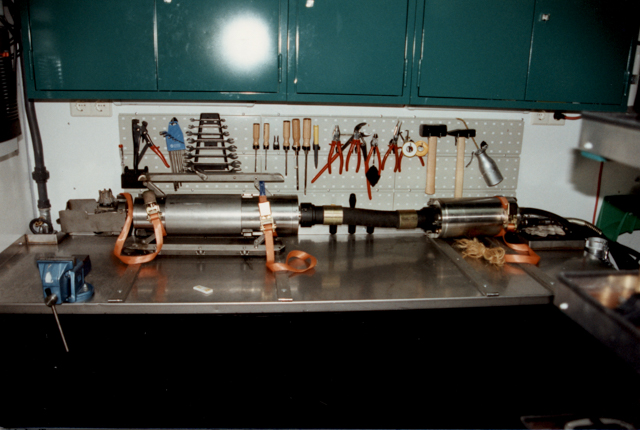
Roboter und Ventildose auf der Werkbank


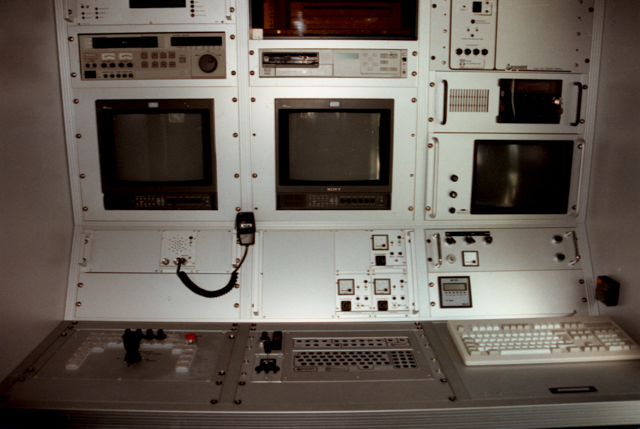
Der Bedienstand im Mutterfahrzeug
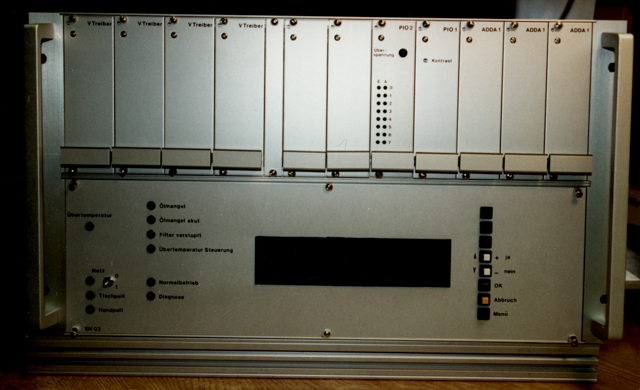
Das Steuergerät
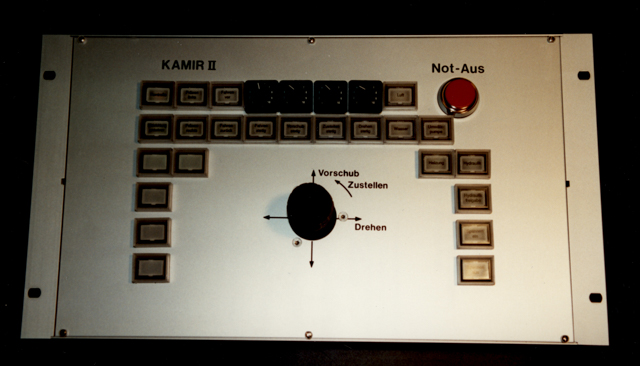
Das Tischpult

Das Handpult